
Cesium基于地形的路径规划
前言 本文讨论的是如何根据起点和终点规划出一条避开大于指定坡度的最短路线,目的是研究A*算法的应用场景,加深对其的理解。 前置知识:理解A*算法,https://juejin.cn/post/7452166964440907817 注:实现过程中,非重点研究的算法直接使用了turfjs库计算,它是一个地理空间计算库。 实现思路 确认起点和终点位置。 根据起点和终点位置来确认出一片包含两者的矩形区域。 将矩形区域划分成均匀的网格。 计算每个网格的坡度。 设定一个坡度阈值,将坡度大于该阈值的网格视为障碍物。 基于上述结果,使用A*算法在可通行的网格中寻找最短路径。 1.确认起点和终点1234567891011121314151617181920212223242526let start = [108.99746771415697, 34.00421419748617];let end = [109.00550820307224, 33.99905943761618];//绘制起点viewer.entities.add({ position: Cesium.Ca...
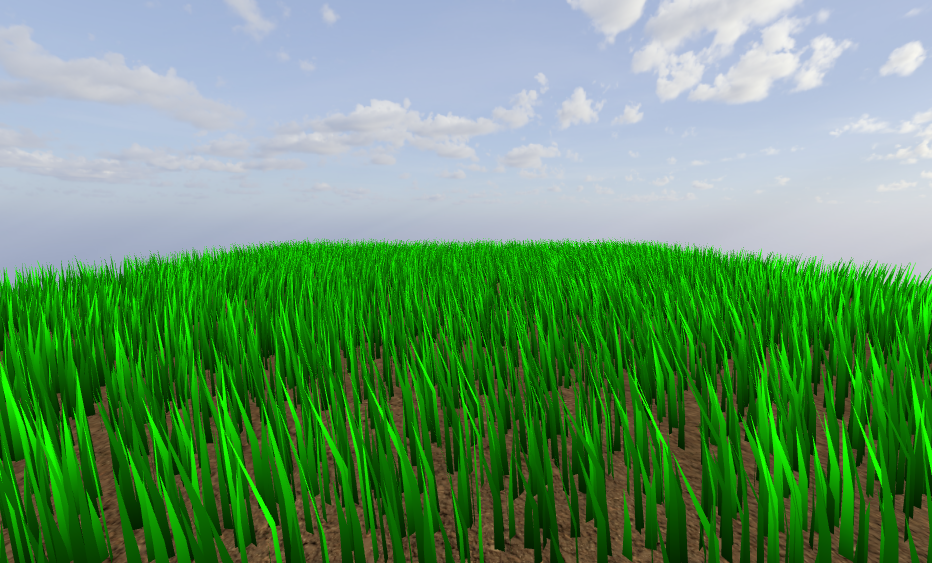
Three.js高性能拟真草地
前言本文介绍如何使用Three.js渲染高性能拟真草地,如下图所示,渲染20000棵草并流畅运行。 初始场景创建threejs场景并添加天空球、地面,基础内容不再赘述。 123456789101112131415161718192021222324252627282930313233343536373839404142434445import * as THREE from "three";import { OrbitControls } from "three/examples/jsm/controls/OrbitControls.js";let scene = new THREE.Scene();let camera = new THREE.PerspectiveCamera( 75, window.innerWidth / window.innerHeight, 0.1, 1000);camera.position.set(0, 9, 57)let renderer = new TH...